# PMN
**Repository Path**: CodeBuilder/PMN
## Basic Information
- **Project Name**: PMN
- **Description**: No description available
- **Primary Language**: Unknown
- **License**: Apache-2.0
- **Default Branch**: TPAMI
- **Homepage**: None
- **GVP Project**: No
## Statistics
- **Stars**: 0
- **Forks**: 0
- **Created**: 2025-04-19
- **Last Updated**: 2025-04-19
## Categories & Tags
**Categories**: Uncategorized
**Tags**: None
## README
# PMN (TPAMI version)
[](https://github.com/megvii-research/PMN/stargazers)
[](https://github.com/megvii-research/PMN/network)
[](https://github.com/megvii-research/PMN/issues)
This branch contains the TPAMI version of PMN.
[[HomePage]](https://fenghansen.github.io/publication/PMN)
[[Paper]](https://10.1109/TPAMI.2023.3301502)
[[Dataset]](https://pan.baidu.com/s/1fXlb-Q_ofHOtVOufe5cwDg?pwd=vmcl)
[[Checkpoints]](https://pan.baidu.com/s/1YIY_bmrdK5SLfrHBQjWfRA?pwd=vmcl)
## 🎉 News
**_(2023.08.30)_**: 📰 We have written an [official blog post](https://zhuanlan.zhihu.com/p/651674070) (in Chinese) for the TPAMI version of the paper. I believe this blog will help you gain a deeper understanding of our work.
**_(2023.08.03)_**: 🎉 Our paper was accepted by *IEEE Transactions on Pattern Analysis and Machine Intelligence* (TPAMI) 2023~~
## 📋 TODO LIST
- [x] Checkout the main branch to TPAMI branch.
- [x] Cleanup & update the code for public datasets.
- [x] Cleanup & update the code for our datasets.
- [x] Test the evaluation code.
- [x] LRID dataset guidelines.
- [ ] Test the the code for training.
## ✨ Highlights
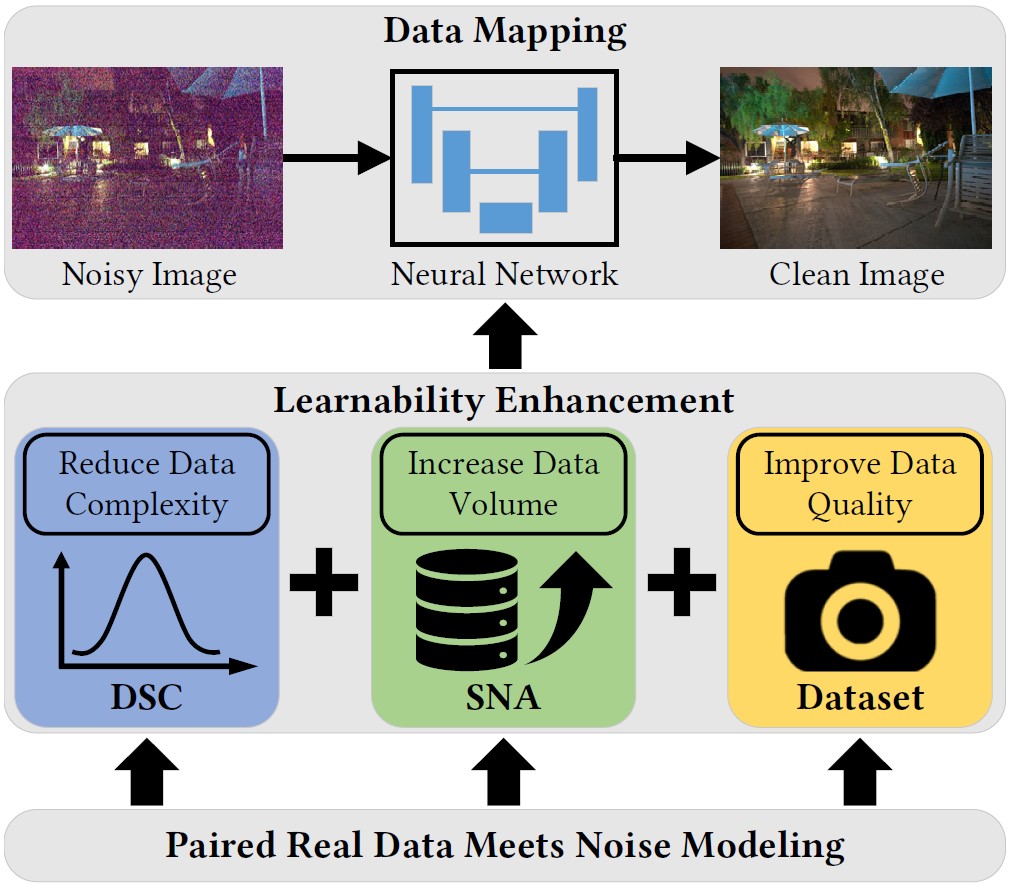
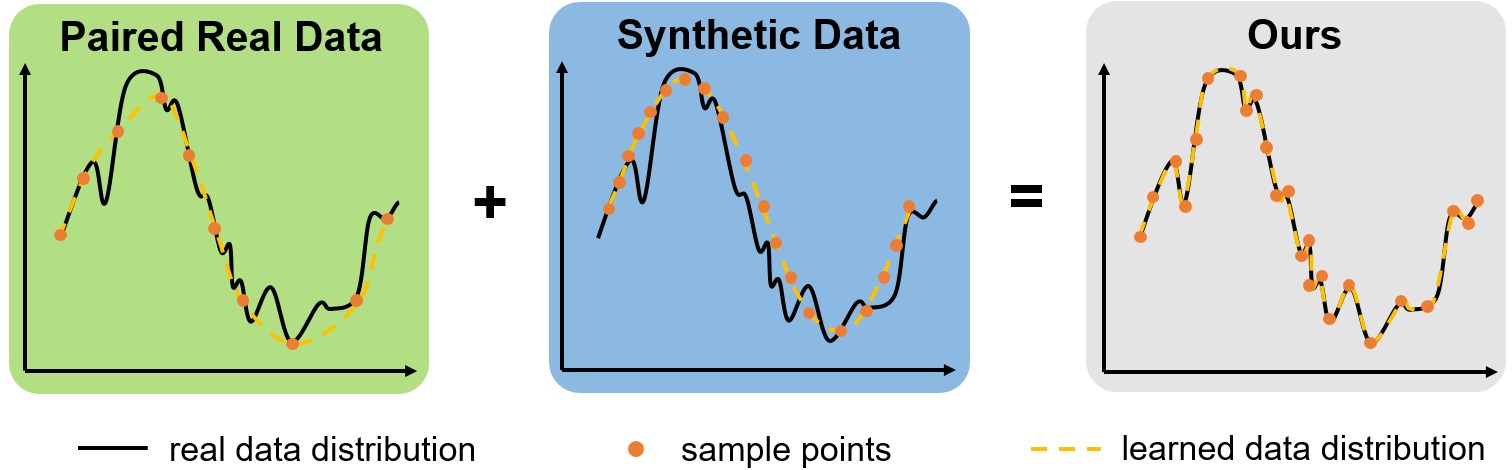
1. We light the idea of **learnability enhancement** for low-light raw image denoising by reforming paired real data according to the noise modeling from a data perspective.
2. We increase the data volume of paired real data with a novel **Shot Noise Augmentation (SNA)** method, which promotes the precision of data mapping by data augmentation.
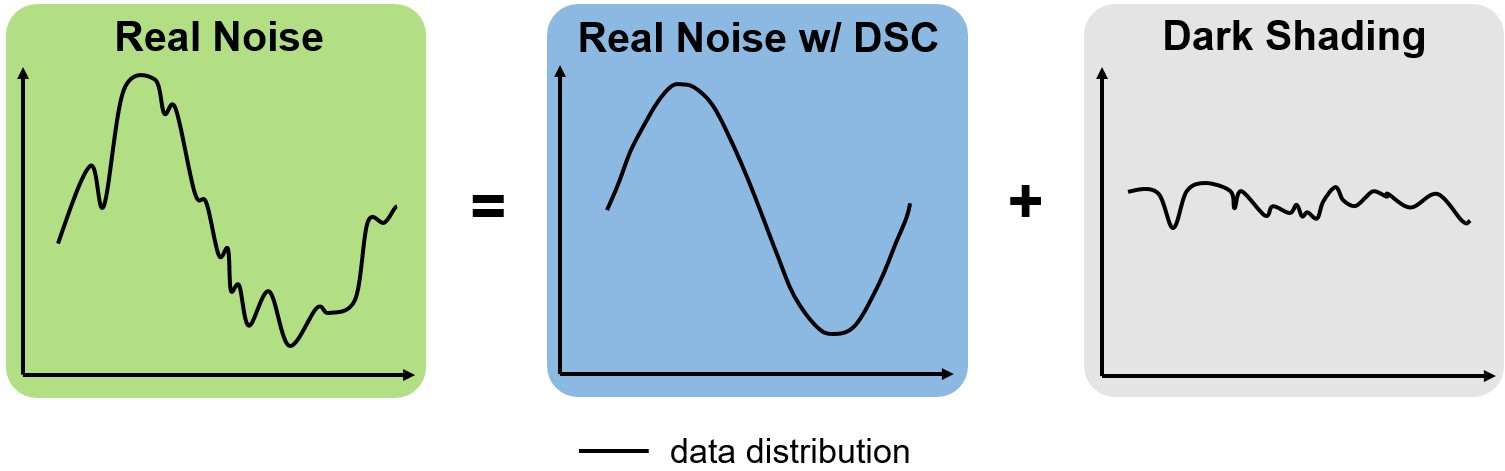
3. We reduce the noise complexity with a novel **Dark Shading Correction (DSC)** method, which promotes the accuracy of data mapping by noise decoupling.
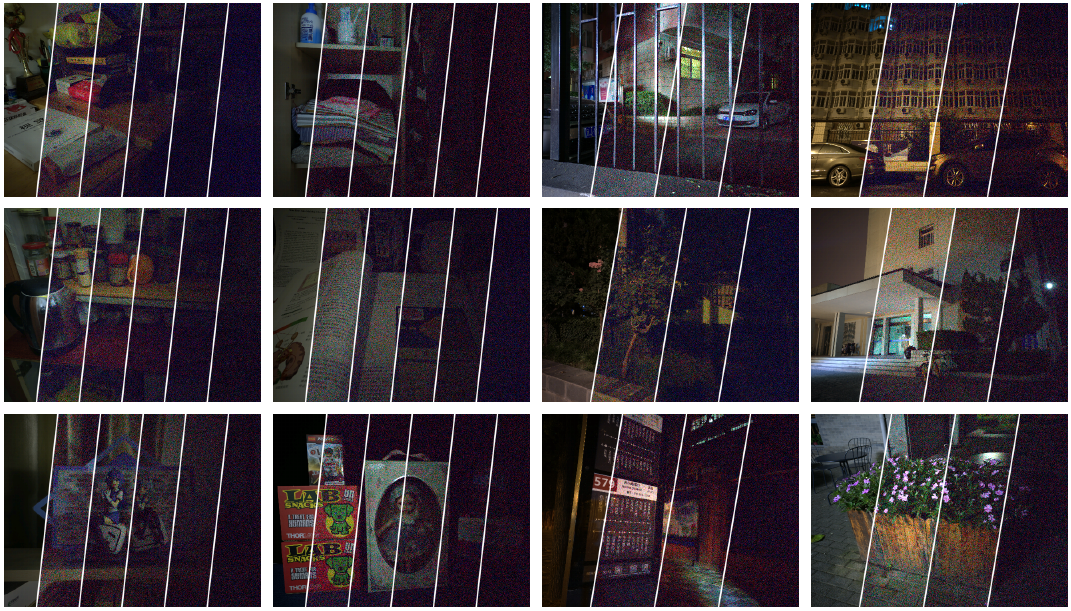
4. We develop a high-quality **image acquisition protocol** and build a **Low-light Raw Image Denoising (LRID) dataset**, which promotes the reliability of data mapping by improving the data quality of paired real data.
5. We demonstrate the superior performance of our methods on public datasets and our dataset in both quantitative results and visual quality.
## 📋 Prerequisites
* Python >=3.6, PyTorch >= 1.6
* Requirements: opencv-python, rawpy, exifread, h5py, scipy
* Platforms: Ubuntu 16.04, cuda-10.1
* Our method can run on the CPU, but we recommend you run it on the GPU
## 🎬 Quick Start
Please download the datasets first, which are necessary for validation (or training).
ELD ([official project](https://github.com/Vandermode/ELD)): [download (11.46 GB)](https://drive.google.com/file/d/13Ge6-FY9RMPrvGiPvw7O4KS3LNfUXqEX/view?usp=sharing)
SID ([official project](https://github.com/cchen156/Learning-to-See-in-the-Dark)): [download (25 GB)](https://storage.googleapis.com/isl-datasets/SID/Sony.zip)
LRID ([official project](https://fenghansen.github.io/publication/PMN/)): [download (523 GB)](https://pan.baidu.com/s/1fXlb-Q_ofHOtVOufe5cwDg?pwd=vmcl), including LRID_raw (523 GB, all data), LRID (185.1 GB, for training), results (19.92 GB, visual results) and metrics (59KB, pkl files).
Due to the large size of [checkpoints and resources](https://pan.baidu.com/s/1YIY_bmrdK5SLfrHBQjWfRA?pwd=vmcl), we have uploaded them to Baidu Netdisk. Please ensure you download these files from the provided link within this project before proceeding with validation or training.
If you choose to save them in a different directory, please remember to update the path location within the respective yaml files (`runfiles/$camera_type$/$method$.yml`).
1. use `get_dataset_infos.py` to generate dataset infos (please modify `--root_dir`)
```bash
# Evaluate
python3 get_dataset_infos.py --dstname ELD --root_dir /data/ELD --mode SonyA7S2
python3 get_dataset_infos.py --dstname SID --root_dir /data/SID/Sony --mode evaltest
python3 get_dataset_infos.py --dstname LRID --root_dir /data/LRID
# Train
python3 get_dataset_infos.py --dstname SID --root_dir /data/SID/Sony --mode train
# python3 get_dataset_infos.py --dstname LRID --root_dir /data/LRID
```
2. evaluate
If you don't want to save pictures, please add ```--save_plot False```. This option will save your time and space.
```bash
# ELD & SID
python3 trainer_SID.py -f runfiles/SonyA7S2/Ours.yml --mode evaltest
# ELD only
python3 trainer_SID.py -f runfiles/SonyA7S2/Ours.yml --mode eval
# SID only
python3 trainer_SID.py -f runfiles/SonyA7S2/Ours.yml --mode test
# LRID
python3 trainer_LRID.py -f runfiles/IMX686/Ours.yml --mode evaltest
```
3. train
```bash
# SID (SonyA7S2)
python3 trainer_SID.py -f runfiles/SonyA7S2/Ours.yml --mode train
# LRID (IMX686)
python3 trainer_LRID.py -f runfiles/IMX686/Ours.yml --mode train
```
## 🗃️ Dataset Guidelines
The structure tree of our [LRID Dataset](https://pan.baidu.com/s/1fXlb-Q_ofHOtVOufe5cwDg?pwd=vmcl) is as follows. We have provided annotations for each folder to facilitate an understanding of the dataset's organizational principles.
If you only need training or evaluation, you can just download **LRID (185.1GB)** along with [checkpoints](https://pan.baidu.com/s/1YIY_bmrdK5SLfrHBQjWfRA?pwd=vmcl). **LRID_raw (523GB)** contains our raw data, including *original ISO-100 frames*, *reference frame with camera ISP*, *abandoned dataset (outdoor_x5)*, and some *intermediate results with their visualizations*.
If you wish to create a new dataset with your own camera, we believe that the details revealed in **LRID_raw** should be valuable as a reference."
The [LRID Dataset](https://pan.baidu.com/s/1fXlb-Q_ofHOtVOufe5cwDg?pwd=vmcl)
(https://pan.baidu.com/s/1YIY_bmrdK5SLfrHBQjWfRA?pwd=vmcl)
```
PMN_TPAMI
├─LRID # Simplified Dataset for Training & Evaluation
│ ├─bias # Dark Frames
│ ├─bias-hot # Dark Frames in hot mode of the sensor
│ │
│ ├─indoor_x5 # Indoor Scenes
│ │ ├─6400 # Low-Light Noisy Data (ISO-6400)
│ │ │ ├─1 # Digital Gain (Low-Light Ratio)
│ │ │ │ ├─000 # Scene Number (10 frames per scene)
│ │ │ │ └─...
│ │ │ └─...
│ │ │
│ │ ├─npy # Binary Data
│ │ │ └─GT_align_ours # GT after Multi-Frame Fusion
│ │ │
│ │ └─metadata_indoor_x5_gt.pkl # Metadata such as WB, CCM, etc.
│ │
│ ├─outdoor_x3 # Outdoor Scenes
│ │ └─... # (Structure similar to indoor_x5)
│ │
│ ├─indoor_x3 # Indoor Scenes with ND Filter
│ │ └─... # (Structure similar to indoor_x5)
│ │
│ └─resources # (Noise calibration results such as dark shading)
│
└─LRID_raw # Full LRID Dataset (Raw Data)
├─bias # Dark Frames
├─bias-hot # Dark Frames in hot mode of the sensor
│
├─indoor_x5 # Indoor Scenes
│ ├─100 # Long-Exposure Raw Data (ISO-100)
│ │ ├─000 # Scene Number (25 frames per scene)
│ │ └─...
│ │
│ ├─6400 # Low-Light Noisy Data (ISO-6400)
│ │ ├─1 # Digital Gain (Low-Light Ratio)
│ │ │ ├─000 # Scene Number (10 frames per scene)
│ │ │ └─...
│ │ └─...
│ │
│ ├─ref # Long-Exposure Raw Data (ISO-100)
│ │ ├─000 # Scene Number (ISO-100 reference frame and its JPEG image after *camera ISP*)
│ │ └─...
│ │
│ ├─GT # Visualization of Scenes and Our Fusion Process
│ │
│ ├─npy # Binary Data
│ │ ├─GT_flow # Optical Flows for Alignment (by HDR+)
│ │ ├─GT_aligns # ISO-100 Frames after Alignment
│ │ └─GT_align_ours # GT after Multi-Frame Fusion
│ │
│ └─metadata_indoor_x5_gt.pkl # Metadata such as WB, CCM, etc.
│
├─outdoor_x3 # Outdoor Scenes
│ └─... # (Structure similar to indoor_x5)
│
├─indoor_x3 # Indoor Scenes with ND Filter
│ └─... # (Structure similar to indoor_x5)
│
├─outdoor_x5 # [Abandon] Extremely Dark Outdoor Scenes with Ultra-Long Exposure
│ └─... # (Structure similar to indoor_x5)
│
└─resources # (Noise calibration results such as dark shading)
```
## 🔍 Code Guidelines
#### SNA
The parameter sampling of SNA is implemented as the `SNA_torch` function in the file ```data_process/process.py```.
The complete process of SNA has the CPU version in the `Mix_Dataset` class in ```data_process/real_datasets.py``` and the GPU version in the `preprocess` function in ```trainer_SID.py```.
#### DSC
Both dark shading calibration and noise calibration require massive dark frames. We provide the calibration results directly. The calibration results for dark shading are stored in the `resources` folder.
The raw noise parameters at each ISO are stored in the `get_camera_noisy_params_max` function in `process.py`, which can be used to calibrate the noise parameters based on a noise model (P-G or ELD).
**HINT: The calibration for the public datasets is based on a SonyA7S2 camera, which has the same sensor as the public datasets but not the same camera.**
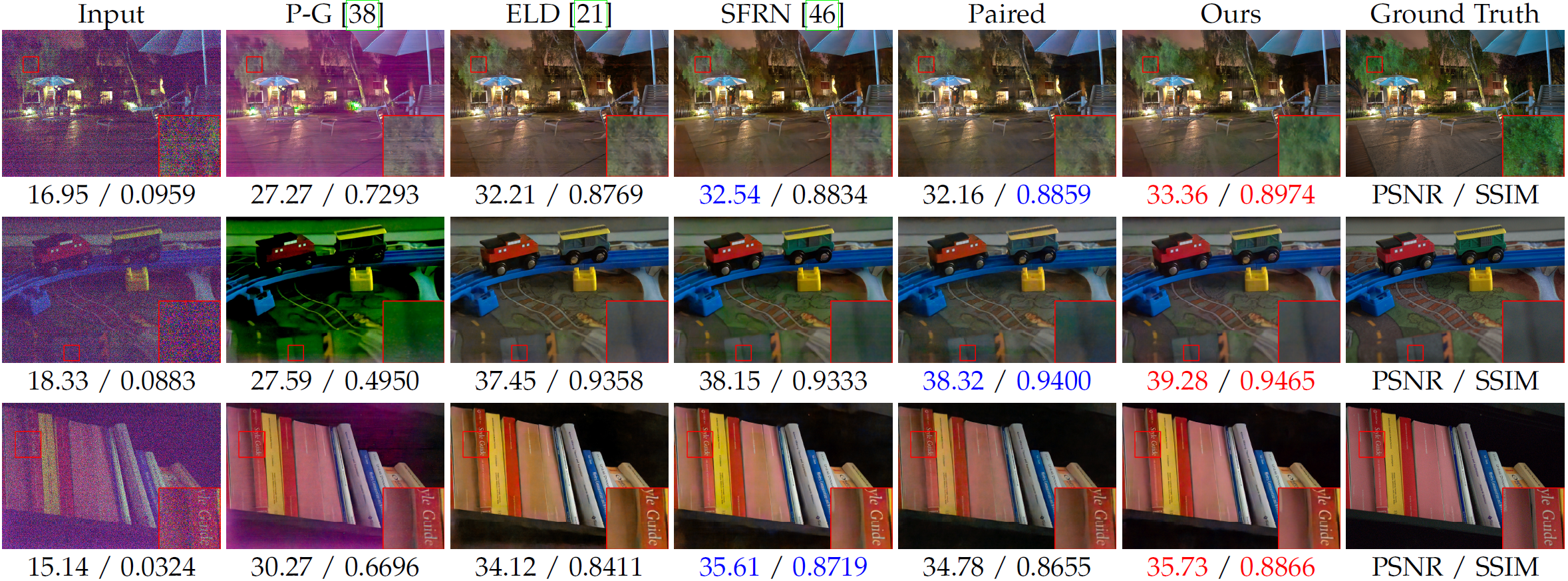
## 📄 Results
### Comparision
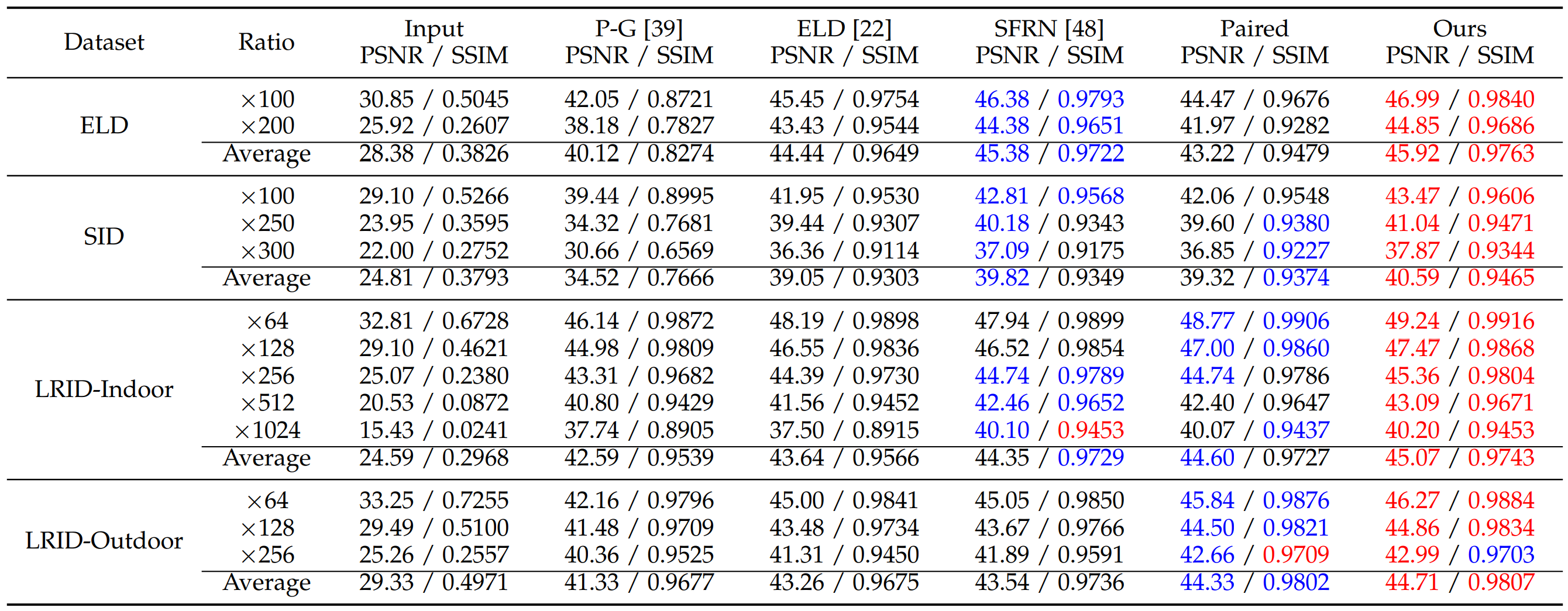
Note:
* The quantitative results on the SID dataset is different from the provided results in ELD (TPAMI) because only the central area is compared in ELD (TPAMI) on the SID dataset.
* We developed the implementation of SFRN and increased the number of dark frames, so its performance is much better than that in our preliminary version.
Visual Comparision
#### ELD

#### SID
#### Ours (LRID)

### Ablation Study
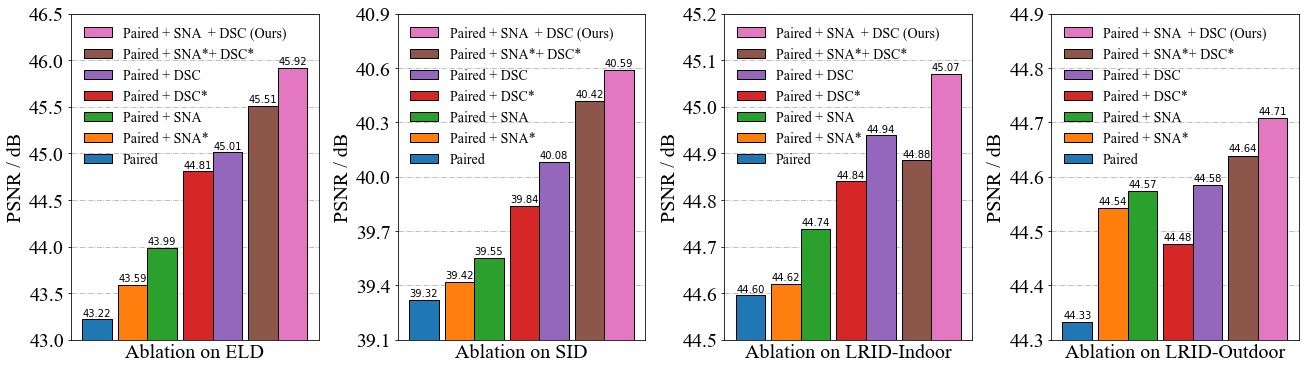
Visual Comparision

## 🏷️ Citation
If you find our code helpful in your research or work please cite our paper.
```bibtex
@inproceedings{feng2022learnability,
author = {Feng, Hansen and Wang, Lizhi and Wang, Yuzhi and Huang, Hua},
title = {Learnability Enhancement for Low-Light Raw Denoising: Where Paired Real Data Meets Noise Modeling},
booktitle = {Proceedings of the 30th ACM International Conference on Multimedia},
year = {2022},
pages = {1436–1444},
numpages = {9},
location = {Lisboa, Portugal},
series = {MM '22}
}
@ARTICLE{feng2023learnability,
author={Feng, Hansen and Wang, Lizhi and Wang, Yuzhi and Fan, Haoqiang and Huang, Hua},
journal={IEEE Transactions on Pattern Analysis and Machine Intelligence},
title={Learnability Enhancement for Low-Light Raw Image Denoising: A Data Perspective},
year={2024},
volume={46},
number={1},
pages={370-387},
doi={10.1109/TPAMI.2023.3301502}
}
```
## 📧 Contact
If you would like to get in-depth help from me, please feel free to contact me (fenghansen@bit.edu.cn / hansen97@outlook.com) with a brief self-introduction (including your name, affiliation, and position).