# maplab
**Repository Path**: sdkmsdn_admin/maplab
## Basic Information
- **Project Name**: maplab
- **Description**: An open visual-inertial mapping framework.
- **Primary Language**: Unknown
- **License**: Apache-2.0
- **Default Branch**: master
- **Homepage**: None
- **GVP Project**: No
## Statistics
- **Stars**: 0
- **Forks**: 0
- **Created**: 2020-03-29
- **Last Updated**: 2023-04-02
## Categories & Tags
**Categories**: Uncategorized
**Tags**: None
## README
 *Ubuntu 14.04+ROS indigo* and *Ubuntu 16.04+ROS kinetic*: [](https://jenkins.asl.ethz.ch/job/maplab_nightly)
This repository contains **maplab**, an open, research-oriented visual-inertial mapping framework, written in C++, for processing and manipulating multi-session maps.
On the one hand, maplab can be considered as a ready-to-use visual-inertial mapping and localization system.
On the other hand, maplab provides the research community with a collection of multi-session mapping tools that include map merging, visual-inertial batch optimization, and loop closure.
Furthermore, it includes an online frontend, **ROVIOLI**, that can create visual-inertial maps and also track a global drift-free pose within a localization map.
For documentation, tutorials and datasets, please visit the [wiki](https://github.com/ethz-asl/maplab/wiki).
Please also check out our video:
*Ubuntu 14.04+ROS indigo* and *Ubuntu 16.04+ROS kinetic*: [](https://jenkins.asl.ethz.ch/job/maplab_nightly)
This repository contains **maplab**, an open, research-oriented visual-inertial mapping framework, written in C++, for processing and manipulating multi-session maps.
On the one hand, maplab can be considered as a ready-to-use visual-inertial mapping and localization system.
On the other hand, maplab provides the research community with a collection of multi-session mapping tools that include map merging, visual-inertial batch optimization, and loop closure.
Furthermore, it includes an online frontend, **ROVIOLI**, that can create visual-inertial maps and also track a global drift-free pose within a localization map.
For documentation, tutorials and datasets, please visit the [wiki](https://github.com/ethz-asl/maplab/wiki).
Please also check out our video:
 ## Features
### Robust visual-inertial odometry with localization
## Features
### Robust visual-inertial odometry with localization
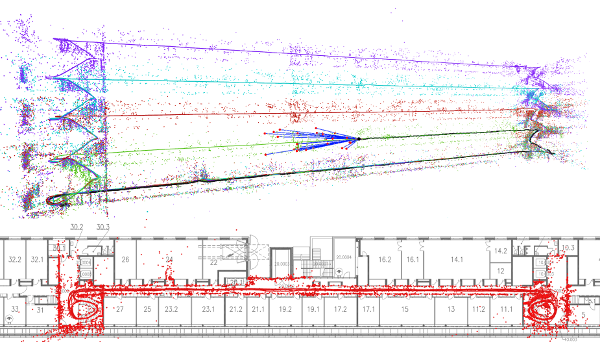
 ### Large-scale multisession mapping and optimization
### Large-scale multisession mapping and optimization

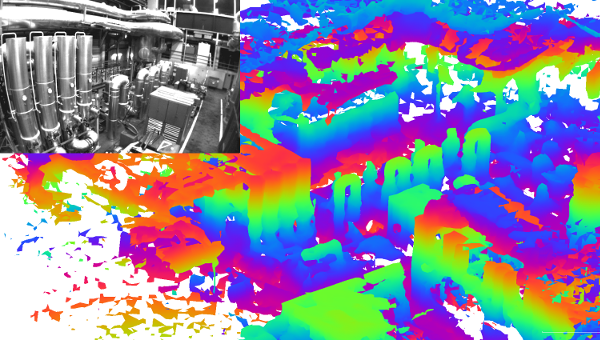
 ### Dense reconstruction
### Dense reconstruction
 ### A research platform extensively tested on real robots
### A research platform extensively tested on real robots
 ## Installation and getting started
The following articles help you with getting started with maplab and ROVIOLI:
- [Installation on Ubuntu 14.04 or 16.04](https://github.com/ethz-asl/maplab/wiki/Installation-Ubuntu)
- [Introduction to the maplab framework](https://github.com/ethz-asl/maplab/wiki/Introduction-to-the-Maplab-Framework)
- [Structure of the framework](https://github.com/ethz-asl/maplab/wiki/Structure-of-the-framework)
- [Running ROVIOLI in VIO mode](https://github.com/ethz-asl/maplab/wiki/Running-ROVIOLI-in-VIO-mode)
- [Basic console usage](https://github.com/ethz-asl/maplab/wiki/Basic-Console-Usage)
- [Console map management](https://github.com/ethz-asl/maplab/wiki/Console-map-management)
More detailed information can be found in the [wiki pages](https://github.com/ethz-asl/maplab/wiki).
## Research Results
The maplab framework has been used as an experimental platform for numerous scientific publications. For a complete list of publications please refer to [Research based on maplab](https://github.com/ethz-asl/maplab/wiki/Related-Research).
## Citing
Please cite the [following paper](https://arxiv.org/abs/1711.10250) when using maplab for your research:
```bibtex
@article{schneider2018maplab,
title={maplab: An Open Framework for Research in Visual-inertial Mapping and Localization},
author={Schneider, Thomas and Dymczyk, Marcin and Fehr, Marius and Egger, Kevin and
Lynen, Simon and Gilitschenski, Igor and Siegwart, Roland},
journal={arXiv preprint arXiv:1711.10250},
year={2018}
}
```
### Additional Citations
Certain components of maplab are directly using the code of the following publications:
* Localization:
```bibtex
@inproceedings{lynen2015get,
title={Get Out of My Lab: Large-scale, Real-Time Visual-Inertial Localization.},
author={Lynen, Simon and Sattler, Torsten and Bosse, Michael and Hesch, Joel A and Pollefeys, Marc and Siegwart, Roland},
booktitle={Robotics: Science and Systems},
year={2015}
}
```
* ROVIOLI which is composed of ROVIO + maplab for map building and localization:
```bibtex
@article{bloesch2017iterated,
title={Iterated extended Kalman filter based visual-inertial odometry using direct photometric feedback},
author={Bloesch, Michael and Burri, Michael and Omari, Sammy and Hutter, Marco and Siegwart, Roland},
journal={The International Journal of Robotics Research},
volume={36},
number={10},
pages={1053--1072},
year={2017},
publisher={SAGE Publications Sage UK: London, England}
}
```
## Credits
* Thomas Schneider
* Marcin Dymczyk
* Marius Fehr
* Kevin Egger
* Simon Lynen
* Mathias Bürki
* Titus Cieslewski
* Timo Hinzmann
* Mathias Gehrig
For a complete list of contributors, have a look at [CONTRIBUTORS.md](https://github.com/ethz-asl/maplab/blob/master/CONTRIBUTORS.md)
## Installation and getting started
The following articles help you with getting started with maplab and ROVIOLI:
- [Installation on Ubuntu 14.04 or 16.04](https://github.com/ethz-asl/maplab/wiki/Installation-Ubuntu)
- [Introduction to the maplab framework](https://github.com/ethz-asl/maplab/wiki/Introduction-to-the-Maplab-Framework)
- [Structure of the framework](https://github.com/ethz-asl/maplab/wiki/Structure-of-the-framework)
- [Running ROVIOLI in VIO mode](https://github.com/ethz-asl/maplab/wiki/Running-ROVIOLI-in-VIO-mode)
- [Basic console usage](https://github.com/ethz-asl/maplab/wiki/Basic-Console-Usage)
- [Console map management](https://github.com/ethz-asl/maplab/wiki/Console-map-management)
More detailed information can be found in the [wiki pages](https://github.com/ethz-asl/maplab/wiki).
## Research Results
The maplab framework has been used as an experimental platform for numerous scientific publications. For a complete list of publications please refer to [Research based on maplab](https://github.com/ethz-asl/maplab/wiki/Related-Research).
## Citing
Please cite the [following paper](https://arxiv.org/abs/1711.10250) when using maplab for your research:
```bibtex
@article{schneider2018maplab,
title={maplab: An Open Framework for Research in Visual-inertial Mapping and Localization},
author={Schneider, Thomas and Dymczyk, Marcin and Fehr, Marius and Egger, Kevin and
Lynen, Simon and Gilitschenski, Igor and Siegwart, Roland},
journal={arXiv preprint arXiv:1711.10250},
year={2018}
}
```
### Additional Citations
Certain components of maplab are directly using the code of the following publications:
* Localization:
```bibtex
@inproceedings{lynen2015get,
title={Get Out of My Lab: Large-scale, Real-Time Visual-Inertial Localization.},
author={Lynen, Simon and Sattler, Torsten and Bosse, Michael and Hesch, Joel A and Pollefeys, Marc and Siegwart, Roland},
booktitle={Robotics: Science and Systems},
year={2015}
}
```
* ROVIOLI which is composed of ROVIO + maplab for map building and localization:
```bibtex
@article{bloesch2017iterated,
title={Iterated extended Kalman filter based visual-inertial odometry using direct photometric feedback},
author={Bloesch, Michael and Burri, Michael and Omari, Sammy and Hutter, Marco and Siegwart, Roland},
journal={The International Journal of Robotics Research},
volume={36},
number={10},
pages={1053--1072},
year={2017},
publisher={SAGE Publications Sage UK: London, England}
}
```
## Credits
* Thomas Schneider
* Marcin Dymczyk
* Marius Fehr
* Kevin Egger
* Simon Lynen
* Mathias Bürki
* Titus Cieslewski
* Timo Hinzmann
* Mathias Gehrig
For a complete list of contributors, have a look at [CONTRIBUTORS.md](https://github.com/ethz-asl/maplab/blob/master/CONTRIBUTORS.md)