# Balance_Bot_DengFOC
**Repository Path**: tang176084/Balance_Bot_DengFOC
## Basic Information
- **Project Name**: Balance_Bot_DengFOC
- **Description**: 灯哥开源的FOC无刷平衡车
- **Primary Language**: Unknown
- **License**: AGPL-3.0
- **Default Branch**: main
- **Homepage**: None
- **GVP Project**: No
## Statistics
- **Stars**: 0
- **Forks**: 1
- **Created**: 2022-10-15
- **Last Updated**: 2024-09-18
## Categories & Tags
**Categories**: Uncategorized
**Tags**: None
## README
**DengFOC平衡车项目**是基于simplefoc开源的[平衡车项目](https://github.com/simplefoc/Arduino-FOC-balancer),进行结构改进和效果优化后应用在我开源的[DengFOC](https://gitee.com/link?target=https%3A%2F%2Fgithub.com%2FToanTech%2FDeng-s-foc-controller)双路无刷电机驱动器上的DengFOC配套项目。


**项目完全开源,你可以根据本Github内容自行白嫖,或者,支持一下灯哥的辛勤劳作,进入灯哥开源TB店购买DengFOC平衡车套件,一键配齐。**
[DengFOC 高敏捷自平衡车套件--链接猛击(进店后在 所有宝贝 处可找到)](https://shop564514875.taobao.com/)
# 一、安装过程
## 1.所需元器件
1. DengsFOC V3(你可以在TB搜索灯哥开源进入店铺购买,或根据DengFOC开源仓库的开源资料自制)
1. 2204云台电机*2
1. AS5600编码器*2
1. MPU6050陀螺仪*1
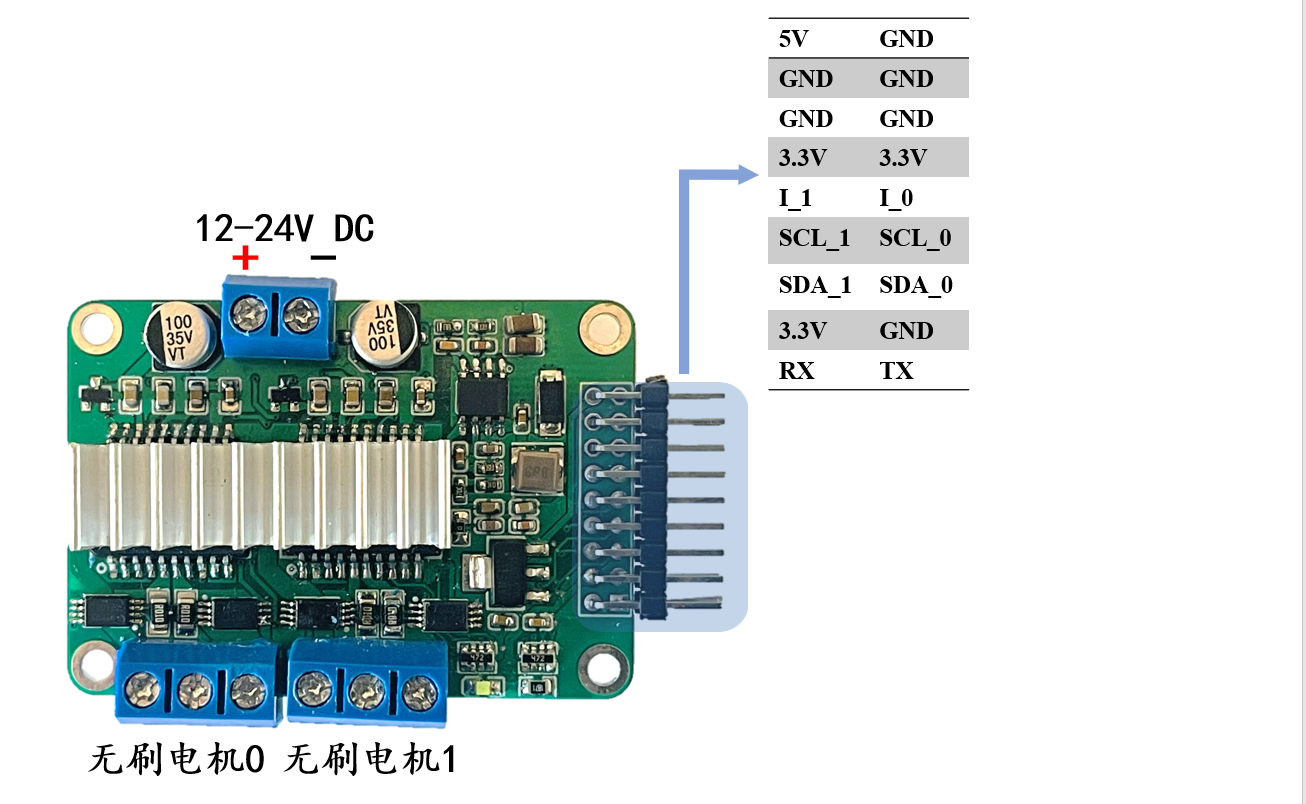
## 2.接线过程
| 零件 | 接线位置 |
| --- | --- |
| 2204云台电机 | DengFoc M0位置 |
| 2204云台电机 | DengFoc M1位置 |
| AS5600 | SDA0,SCL0,3V3,GND |
| AS5600 | SDA1,SCL1,3V3,GND |
| MPU6050 | SDA1,SCL1,3V3,GND |
| 电池以及电源开关线 | DengFoc 电源端子 |
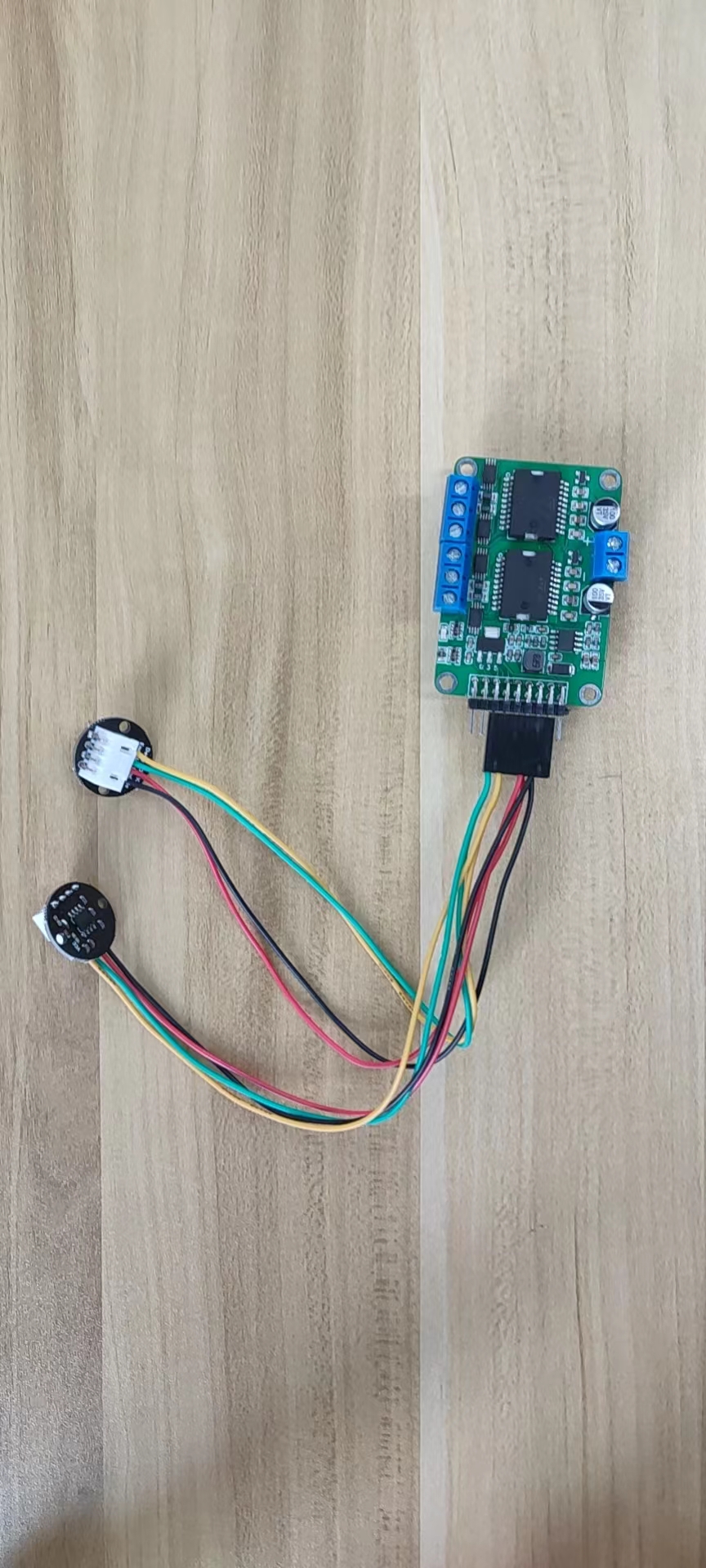
如果你是自行DIY,那么按照上面的接线表格将线接入DengFOC即可;如果你是采用在 [灯哥开源 淘宝店](https://gitee.com/link?target=https%3A%2F%2Fshop564514875.taobao.com%2F) 购买的平衡车套件,那么你会得到**如下所示配套线材**。
配套接线材料:
- AS5600编码器接线套装 一头是杜邦端子,接有一根黑线GND,一根红线VCC,一根绿线SDA,一根黄线SCL,另一端是4p端子。
- MPU6050接线端子套装 两头是4p端子,接有一根黑线GND,一根红线VCC,一根绿线SDA,一根黄线SCL。
- 电源接线开关
## 3.组装步骤
- AS5600编码器红色线代表VCC,黑色线代表GND,黄线代表SCL,绿色代表SDA。将端子一端的4p端子连接到AS5600对应的端子上。同时将接线端子的另外一端杜邦壳接到DengFoc的排针对应的接口上。
- MPU6050陀螺仪接线端子红色线代表VCC,黑色线代表GND,黄色线代表SCL,绿色线代表SDA,接线端子一端MPU6050连接,一端与AS5600编码器相连。
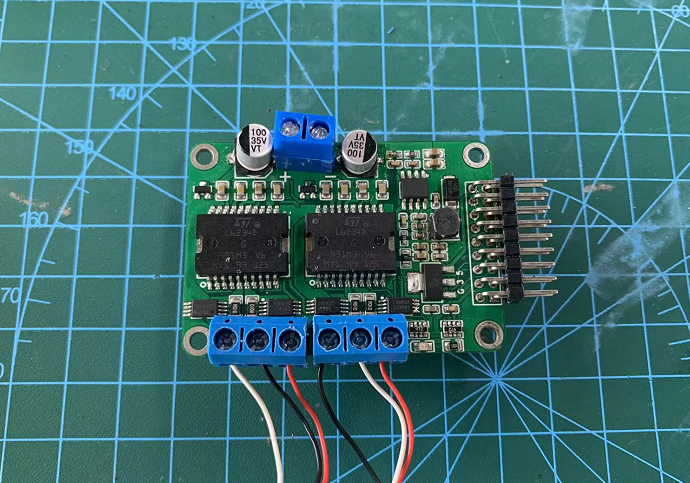
- 电机1三线连接到DengFoc M0端从左到右分别对应白、黑、红,电机2连接到DengFoc M1端从左到右分别对应黑、白、红。
详细安装过程可以观看安装视频,视频中有关于车体各部分的详细安装步骤以及连线步骤。
# 二、调试过程
- 烧写平衡车代码例程,上电之后等待陀螺仪校准,以及电机校准。
- 看平衡车是否能够自稳。
- 微信扫描下图二维码,进入小程序。
- 进入小程序页面,看蓝牙是否连接成功。小程序页面图如下所示。
- 接着移动摇杆看功能是否正常。
- 如果想自己DIY小车控制速度,可以在例程中对小车控制参数进行修改。