# PSMNet
**Repository Path**: victorchew/PSMNet
## Basic Information
- **Project Name**: PSMNet
- **Description**: Pyramid Stereo Matching Network (CVPR2018)
- **Primary Language**: Unknown
- **License**: MIT
- **Default Branch**: master
- **Homepage**: None
- **GVP Project**: No
## Statistics
- **Stars**: 0
- **Forks**: 0
- **Created**: 2020-09-12
- **Last Updated**: 2020-12-19
## Categories & Tags
**Categories**: Uncategorized
**Tags**: None
## README
# Pyramid Stereo Matching Network
This repository contains the code (in PyTorch) for "[Pyramid Stereo Matching Network](https://arxiv.org/abs/1803.08669)" paper (CVPR 2018) by [Jia-Ren Chang](https://jiarenchang.github.io/) and [Yong-Sheng Chen](https://people.cs.nctu.edu.tw/~yschen/).
### Citation
```
@inproceedings{chang2018pyramid,
title={Pyramid Stereo Matching Network},
author={Chang, Jia-Ren and Chen, Yong-Sheng},
booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
pages={5410--5418},
year={2018}
}
```
## Contents
1. [Introduction](#introduction)
2. [Usage](#usage)
3. [Results](#results)
4. [Contacts](#contacts)
## Introduction
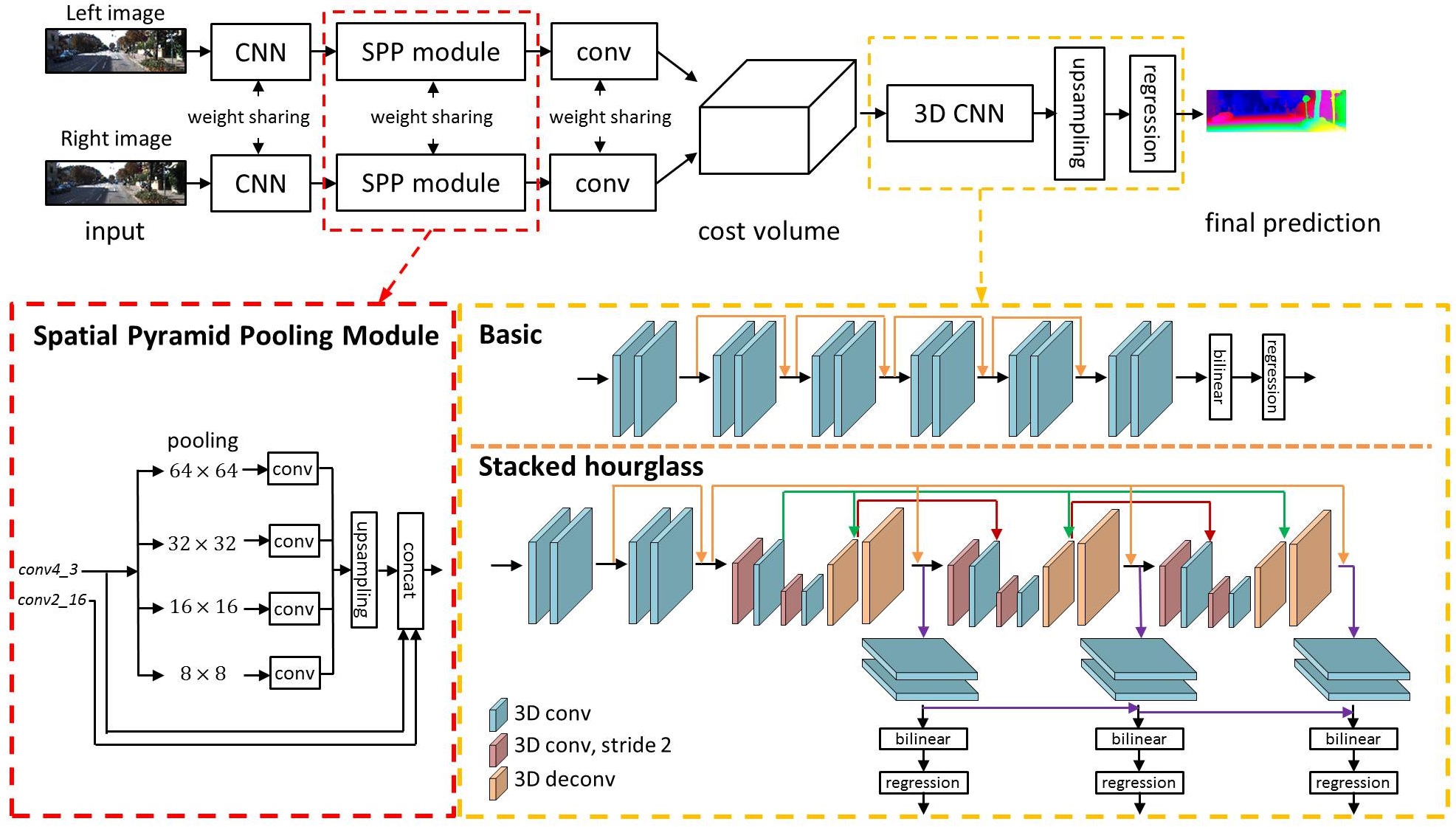
Recent work has shown that depth estimation from a stereo pair of images can be formulated as a supervised learning task to be resolved with convolutional neural networks (CNNs). However, current architectures rely on patch-based Siamese networks, lacking the means to exploit context information for finding correspondence in illposed regions. To tackle this problem, we propose PSMNet, a pyramid stereo matching network consisting of two main modules: spatial pyramid pooling and 3D CNN. The spatial pyramid pooling module takes advantage of the capacity of global context information by aggregating context in different scales and locations to form a cost volume. The 3D CNN learns to regularize cost volume using stacked multiple hourglass networks in conjunction with intermediate supervision.
 ## Usage
### Dependencies
- [Python2.7](https://www.python.org/downloads/)
- [PyTorch(0.4.0+)](http://pytorch.org)
- torchvision 0.2.0 (higher version may cause issues)
- [KITTI Stereo](http://www.cvlibs.net/datasets/kitti/eval_stereo.php)
- [Scene Flow](https://lmb.informatik.uni-freiburg.de/resources/datasets/SceneFlowDatasets.en.html)
```
Usage of Scene Flow dataset
Download RGB cleanpass images and its disparity for three subset: FlyingThings3D, Driving, and Monkaa.
Put them in the same folder.
And rename the folder as: "driving_frames_cleanpass", "driving_disparity", "monkaa_frames_cleanpass", "monkaa_disparity", "frames_cleanpass", "frames_disparity".
```
### Notice
1. Warning of upsample function in PyTorch 0.4.1+: add "align_corners=True" to upsample functions.
2. Output disparity may be better with multipling by 1.17. Reported from issues [#135](https://github.com/JiaRenChang/PSMNet/issues/135) and [#113](https://github.com/JiaRenChang/PSMNet/issues/113).
3. with torchvision > 0.2.0, RGB images should be loaded without adding ".astype('float32'))"
### Train
As an example, use the following command to train a PSMNet on Scene Flow
```
python main.py --maxdisp 192 \
--model stackhourglass \
--datapath (your scene flow data folder)\
--epochs 10 \
--loadmodel (optional)\
--savemodel (path for saving model)
```
As another example, use the following command to finetune a PSMNet on KITTI 2015
```
python finetune.py --maxdisp 192 \
--model stackhourglass \
--datatype 2015 \
--datapath (KITTI 2015 training data folder) \
--epochs 300 \
--loadmodel (pretrained PSMNet) \
--savemodel (path for saving model)
```
You can also see those examples in run.sh.
### Evaluation
Use the following command to evaluate the trained PSMNet on KITTI 2015 test data
```
python submission.py --maxdisp 192 \
--model stackhourglass \
--KITTI 2015 \
--datapath (KITTI 2015 test data folder) \
--loadmodel (finetuned PSMNet) \
```
### Pretrained Model
※NOTE: The pretrained model were saved in .tar; however, you don't need to untar it. Use torch.load() to load it.
Update: 2018/9/6 We released the pre-trained KITTI 2012 model.
| KITTI 2015 | Scene Flow | KITTI 2012|
|---|---|---|
|[Google Drive](https://drive.google.com/file/d/1pHWjmhKMG4ffCrpcsp_MTXMJXhgl3kF9/view?usp=sharing)|[Google Drive](https://drive.google.com/file/d/1xoqkQ2NXik1TML_FMUTNZJFAHrhLdKZG/view?usp=sharing)|[Google Drive](https://drive.google.com/file/d/1p4eJ2xDzvQxaqB20A_MmSP9-KORBX1pZ/view?usp=sharing)|
### Test on your own stereo pair
```
python Test_img.py --loadmodel (finetuned PSMNet) --leftimg ./left.png --rightimg ./right.png --isgray False
```
## Results
### Evaluation of PSMNet with different settings
## Usage
### Dependencies
- [Python2.7](https://www.python.org/downloads/)
- [PyTorch(0.4.0+)](http://pytorch.org)
- torchvision 0.2.0 (higher version may cause issues)
- [KITTI Stereo](http://www.cvlibs.net/datasets/kitti/eval_stereo.php)
- [Scene Flow](https://lmb.informatik.uni-freiburg.de/resources/datasets/SceneFlowDatasets.en.html)
```
Usage of Scene Flow dataset
Download RGB cleanpass images and its disparity for three subset: FlyingThings3D, Driving, and Monkaa.
Put them in the same folder.
And rename the folder as: "driving_frames_cleanpass", "driving_disparity", "monkaa_frames_cleanpass", "monkaa_disparity", "frames_cleanpass", "frames_disparity".
```
### Notice
1. Warning of upsample function in PyTorch 0.4.1+: add "align_corners=True" to upsample functions.
2. Output disparity may be better with multipling by 1.17. Reported from issues [#135](https://github.com/JiaRenChang/PSMNet/issues/135) and [#113](https://github.com/JiaRenChang/PSMNet/issues/113).
3. with torchvision > 0.2.0, RGB images should be loaded without adding ".astype('float32'))"
### Train
As an example, use the following command to train a PSMNet on Scene Flow
```
python main.py --maxdisp 192 \
--model stackhourglass \
--datapath (your scene flow data folder)\
--epochs 10 \
--loadmodel (optional)\
--savemodel (path for saving model)
```
As another example, use the following command to finetune a PSMNet on KITTI 2015
```
python finetune.py --maxdisp 192 \
--model stackhourglass \
--datatype 2015 \
--datapath (KITTI 2015 training data folder) \
--epochs 300 \
--loadmodel (pretrained PSMNet) \
--savemodel (path for saving model)
```
You can also see those examples in run.sh.
### Evaluation
Use the following command to evaluate the trained PSMNet on KITTI 2015 test data
```
python submission.py --maxdisp 192 \
--model stackhourglass \
--KITTI 2015 \
--datapath (KITTI 2015 test data folder) \
--loadmodel (finetuned PSMNet) \
```
### Pretrained Model
※NOTE: The pretrained model were saved in .tar; however, you don't need to untar it. Use torch.load() to load it.
Update: 2018/9/6 We released the pre-trained KITTI 2012 model.
| KITTI 2015 | Scene Flow | KITTI 2012|
|---|---|---|
|[Google Drive](https://drive.google.com/file/d/1pHWjmhKMG4ffCrpcsp_MTXMJXhgl3kF9/view?usp=sharing)|[Google Drive](https://drive.google.com/file/d/1xoqkQ2NXik1TML_FMUTNZJFAHrhLdKZG/view?usp=sharing)|[Google Drive](https://drive.google.com/file/d/1p4eJ2xDzvQxaqB20A_MmSP9-KORBX1pZ/view?usp=sharing)|
### Test on your own stereo pair
```
python Test_img.py --loadmodel (finetuned PSMNet) --leftimg ./left.png --rightimg ./right.png --isgray False
```
## Results
### Evaluation of PSMNet with different settings
 ※Note that the reported 3-px validation errors were calculated using KITTI's official matlab code, not our code.
### Results on KITTI 2015 leaderboard
[Leaderboard Link](http://www.cvlibs.net/datasets/kitti/eval_scene_flow.php?benchmark=stereo)
| Method | D1-all (All) | D1-all (Noc)| Runtime (s) |
|---|---|---|---|
| PSMNet | 2.32 % | 2.14 % | 0.41 |
| [iResNet-i2](https://arxiv.org/abs/1712.01039) | 2.44 % | 2.19 % | 0.12 |
| [GC-Net](https://arxiv.org/abs/1703.04309) | 2.87 % | 2.61 % | 0.90 |
| [MC-CNN](https://github.com/jzbontar/mc-cnn) | 3.89 % | 3.33 % | 67 |
### Qualitative results
#### Left image
※Note that the reported 3-px validation errors were calculated using KITTI's official matlab code, not our code.
### Results on KITTI 2015 leaderboard
[Leaderboard Link](http://www.cvlibs.net/datasets/kitti/eval_scene_flow.php?benchmark=stereo)
| Method | D1-all (All) | D1-all (Noc)| Runtime (s) |
|---|---|---|---|
| PSMNet | 2.32 % | 2.14 % | 0.41 |
| [iResNet-i2](https://arxiv.org/abs/1712.01039) | 2.44 % | 2.19 % | 0.12 |
| [GC-Net](https://arxiv.org/abs/1703.04309) | 2.87 % | 2.61 % | 0.90 |
| [MC-CNN](https://github.com/jzbontar/mc-cnn) | 3.89 % | 3.33 % | 67 |
### Qualitative results
#### Left image
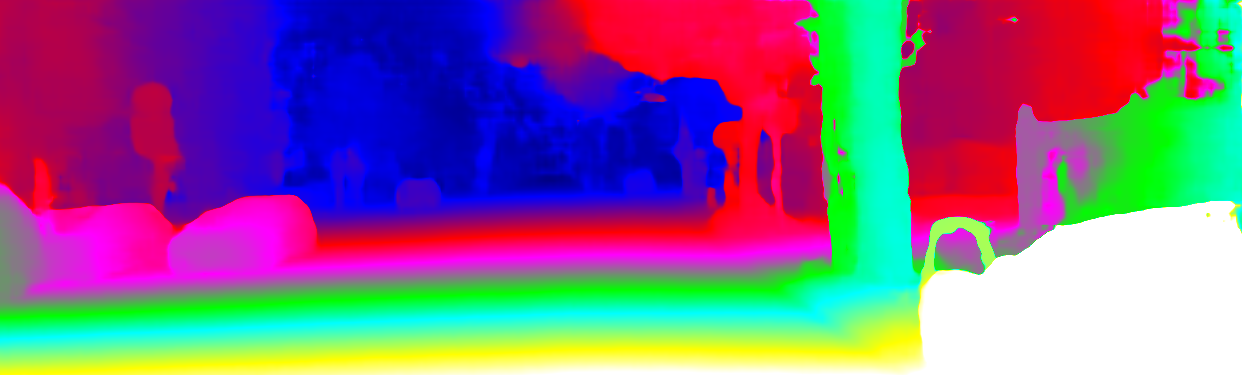
 #### Predicted disparity
#### Predicted disparity
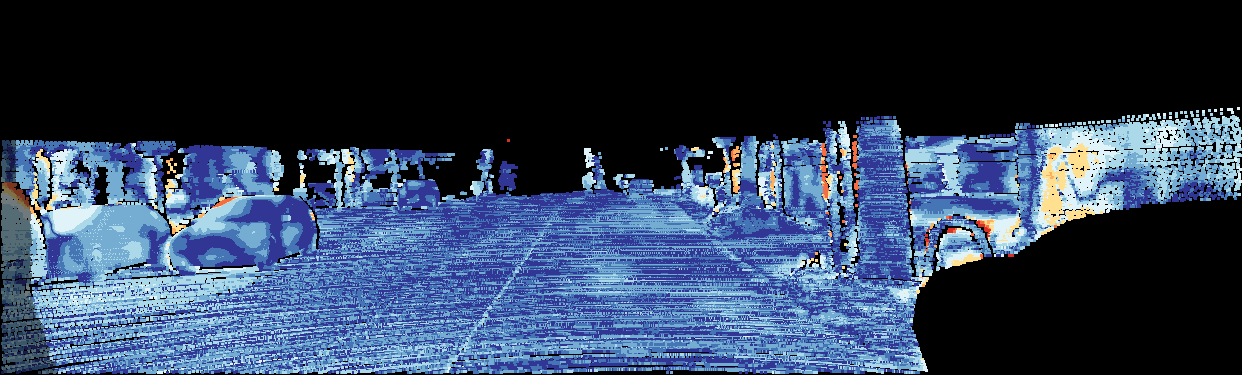
 #### Error
#### Error
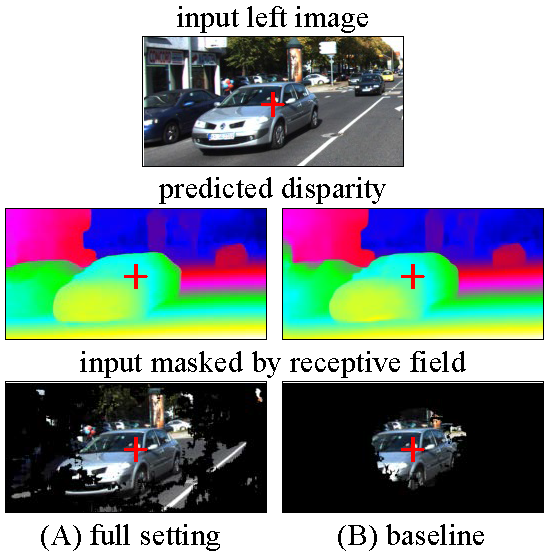
 ### Visualization of Receptive Field
We visualize the receptive fields of different settings of PSMNet, full setting and baseline.
Full setting: dilated conv, SPP, stacked hourglass
Baseline: no dilated conv, no SPP, no stacked hourglass
The receptive fields were calculated for the pixel at image center, indicated by the red cross.
### Visualization of Receptive Field
We visualize the receptive fields of different settings of PSMNet, full setting and baseline.
Full setting: dilated conv, SPP, stacked hourglass
Baseline: no dilated conv, no SPP, no stacked hourglass
The receptive fields were calculated for the pixel at image center, indicated by the red cross.
 ## Contacts
followwar@gmail.com
Any discussions or concerns are welcomed!
## Contacts
followwar@gmail.com
Any discussions or concerns are welcomed!