# y-serialplot
**Repository Path**: zhang-lei1921/y-serialplot
## Basic Information
- **Project Name**: y-serialplot
- **Description**: No description available
- **Primary Language**: Unknown
- **License**: Not specified
- **Default Branch**: master
- **Homepage**: None
- **GVP Project**: No
## Statistics
- **Stars**: 0
- **Forks**: 4
- **Created**: 2023-03-28
- **Last Updated**: 2023-03-28
## Categories & Tags
**Categories**: Uncategorized
**Tags**: None
## README
# y-serialplot使用说明
> 这款软件可以将串口接受到的数据以波形的方式显示,方便查看数据和调试参数。在电赛等一些场合用来调试PID参数非常方便。
>
> 在刚开始参加比赛的时候做无人机,全靠肉眼调参,然后一遍又一遍的修改参数,编译程序,下载程序。效率低而且慢。后来了解到有软件示波器,用过匿名的,用过山外调试助手,但是他们看波形还行,在线修改参数不方便。后来又了解到一个叫做serialplot的软件,非常好用,但是发送参数还是感觉不合适。所以就想着自己开发一款软件用来调参。
>
> 这款软件UI清新,通信协议简单,发送命令、波形名称显示等更多考虑到舒适性的问题。但是因为波形显示窗口使用的是Qt自带的QChart控件,所以在大量数据(5万个点左右)时有掉帧的现象。
**开发环境**
+ QT5.9.8
**项目开源仓库链接**
+ github:https://github.com/syuan7/y-serialplot
+ gitee:https://gitee.com/syuan7/y-serialplot
**仓库文件介绍**
# 1 软件页面说明
+ 标题栏

+ 视窗区域
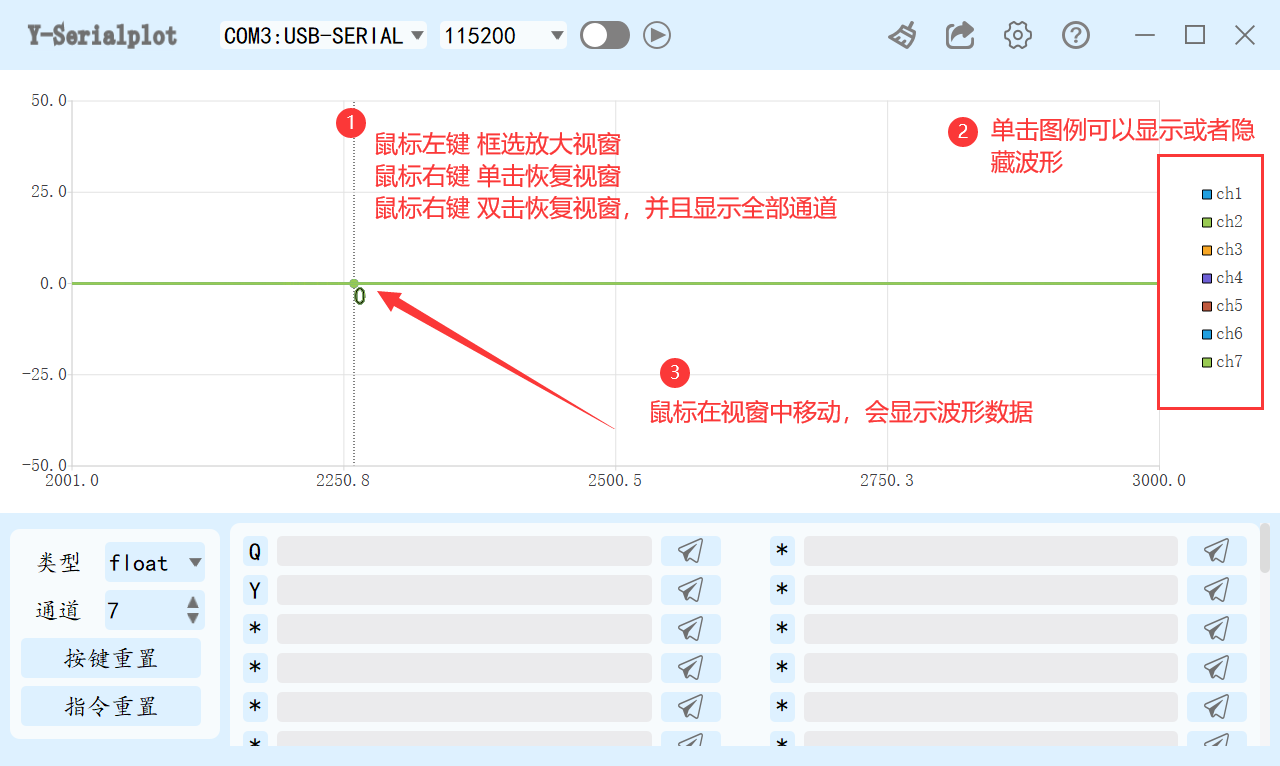
+ 命令发送区域

命令的发送有:按对应的快捷键,鼠标点击发送按钮,输入指令后按下回车键,这三种发送方式。使用起来更加方便。
# 2 如何连接下位机
+ 有线连接
 + 无线连接
+ 无线连接
 单片机的串口能够被电脑识别,必须要有USB-TTL转接模块才行。因为一般单片机的串口为TTL电平信号,和USB接口的电平信号不兼容,因此需要特殊的芯片进行转接。常用的芯片有CH340和CP2102。
**然后使用USB-TTL模块需要根据芯片信号,安装驱动。**
驱动安装好了之后,应该能够在电脑的设备管理器中看到该串口设备。(下图中的芯片为CH340芯片)
单片机的串口能够被电脑识别,必须要有USB-TTL转接模块才行。因为一般单片机的串口为TTL电平信号,和USB接口的电平信号不兼容,因此需要特殊的芯片进行转接。常用的芯片有CH340和CP2102。
**然后使用USB-TTL模块需要根据芯片信号,安装驱动。**
驱动安装好了之后,应该能够在电脑的设备管理器中看到该串口设备。(下图中的芯片为CH340芯片)
 这里提供了CH340的驱动,一起放在软件目录下了。
如果安装失败,可以尝试先点击卸载,然后再点击安装。

# 3 通信协议说明
正确连接设备之后,需要在设备中按照本节通信协议编写波形发送程序,本软件才能显示数据波形。
## 3.1 下位机向软件发送波形的协议
为了能够自动适应波形通道的名称,通信协议分为两段。
+ 注意:**软件和STM32使用的均是小端模式。**
+ 第一段:name字段
| | 帧头 | ch1的名称 | 分隔符 | ch2的名称 | 分隔符 | chn的名称 | 帧尾 |
| ---- | ------ | -------------------------- | -------- | -------------------------- | -------- | --------- | ------ |
| 字符 | AABBCC | name1 | , | name2 | , | ... | CCBBAA |
| 备注 | | 任意长度的字符串,不能中文 | 英文逗号 | 任意长度的字符串,不能中文 | 英文逗号 | .... | |
**例:AABBCCch1,ch2,ch3CCBBAA**
+ 第二段:数据字段
| | 帧头 | ch1的数据 | ch2的数据 | chn的数据 | 帧尾 |
| ---- | ------ | -------------------------- | -------------------- | -------------------- | ------ |
| 字符 | DDEEFF | 123 | 123 | ... | FFEEDD |
| 备注 | | 数据类型为上位机设置的类型 | 所有通道数据类型一致 | 所有通道数据类型一致 | |
**例:DDEEFF12asdfas#@#$345678FFEEEDD**
中间一段莫名其妙的字符,应该可以在第4节的发送函数中得到答案。
## 3.2 上位机向下位机发送指令的协议
+ 这个协议根据下位机的解析程序确定,可以自己决定发送什么,只要自己能够正确解析就行。
+ 这里说明提供的STM32示例程序中使用的通信协议。
| | 控制字段 | 分隔符 | 数据1 | 分隔符 | 数据2 | 分隔符 | 数据3 | 结束控制符 |
| ---- | ------ | ---------------------------- | -------------------- | -------------------- | ------ | ---- | ---- | ---- |
| 字符 | 3个char | = | 1个float | 英文 , | 1个float | 英文 , | 1个float | # |
**例:PID=10.21,21.21,13.31#**
直接输入浮点数就行,下位机中使用C语言的标准库进行格式化。
# 4 STM32示例程序
在软件包中提供了STM32F103的示例工程。默认使用本软件的同学有STM32或者单片机开发基础。所以就不介绍工程结构和串口初始化部分的程序。没有基础的同学可以可以自行学习一下。
下面主要介绍波形发送、命令接受的程序。
这里提供了CH340的驱动,一起放在软件目录下了。
如果安装失败,可以尝试先点击卸载,然后再点击安装。

# 3 通信协议说明
正确连接设备之后,需要在设备中按照本节通信协议编写波形发送程序,本软件才能显示数据波形。
## 3.1 下位机向软件发送波形的协议
为了能够自动适应波形通道的名称,通信协议分为两段。

+ 注意:**软件和STM32使用的均是小端模式。**
+ 第一段:name字段
| | 帧头 | ch1的名称 | 分隔符 | ch2的名称 | 分隔符 | chn的名称 | 帧尾 |
| ---- | ------ | -------------------------- | -------- | -------------------------- | -------- | --------- | ------ |
| 字符 | AABBCC | name1 | , | name2 | , | ... | CCBBAA |
| 备注 | | 任意长度的字符串,不能中文 | 英文逗号 | 任意长度的字符串,不能中文 | 英文逗号 | .... | |
**例:AABBCCch1,ch2,ch3CCBBAA**
+ 第二段:数据字段
| | 帧头 | ch1的数据 | ch2的数据 | chn的数据 | 帧尾 |
| ---- | ------ | -------------------------- | -------------------- | -------------------- | ------ |
| 字符 | DDEEFF | 123 | 123 | ... | FFEEDD |
| 备注 | | 数据类型为上位机设置的类型 | 所有通道数据类型一致 | 所有通道数据类型一致 | |
**例:DDEEFF12asdfas#@#$345678FFEEEDD**
中间一段莫名其妙的字符,应该可以在第4节的发送函数中得到答案。
## 3.2 上位机向下位机发送指令的协议
+ 这个协议根据下位机的解析程序确定,可以自己决定发送什么,只要自己能够正确解析就行。
+ 这里说明提供的STM32示例程序中使用的通信协议。
| | 控制字段 | 分隔符 | 数据1 | 分隔符 | 数据2 | 分隔符 | 数据3 | 结束控制符 |
| ---- | ------ | ---------------------------- | -------------------- | -------------------- | ------ | ---- | ---- | ---- |
| 字符 | 3个char | = | 1个float | 英文 , | 1个float | 英文 , | 1个float | # |
**例:PID=10.21,21.21,13.31#**
直接输入浮点数就行,下位机中使用C语言的标准库进行格式化。
# 4 STM32示例程序
在软件包中提供了STM32F103的示例工程。默认使用本软件的同学有STM32或者单片机开发基础。所以就不介绍工程结构和串口初始化部分的程序。没有基础的同学可以可以自行学习一下。
下面主要介绍波形发送、命令接受的程序。
 ## 4.1 波形发送
例程中使用的是 STM32 的串口1进行数据收发。
1. 波形发送业务代码
``` C
void send_wave(void)
{
//定义通道名帧头帧尾
u8 frameNameHead[] = "AABBCC";
u8 frameNameEnd[] = "CCBBAA";
//定义数据帧头帧尾
u8 frameDataHead[] = "DDEEFF";
u8 frameDataEnd[] = "FFEEDD";
//定义通道名
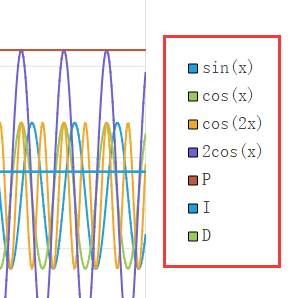
u8 name[] = {"sin(x),cos(x),cos(2x),2cos(x),P,I,D"};
//赋值数据
float channels[7];
channels[0] = datas[0];
channels[1] = datas[1];
channels[2] = datas[2];
channels[3] = datas[3];
channels[4] = cmd_P;
channels[5] = cmd_I;
channels[6] = cmd_D;
//通过串口1,向上位机发送数据
usart_senddatas(USART1,frameNameHead,sizeof(frameNameHead)-1);
usart_senddatas(USART1,name,sizeof(name)-1);
usart_senddatas(USART1,frameNameEnd,sizeof(frameNameEnd)-1);
usart_senddatas(USART1,frameDataHead,sizeof(frameDataHead)-1);
usart_senddatas(USART1,(u8*)channels,sizeof(channels));
usart_senddatas(USART1,frameDataEnd,sizeof(frameDataEnd)-1);
}
```
12行的通道名称,是一个字符串,不同通道之间以 `英文逗号,` 间隔,上位机中设置了多少个通道就写多少个名字。
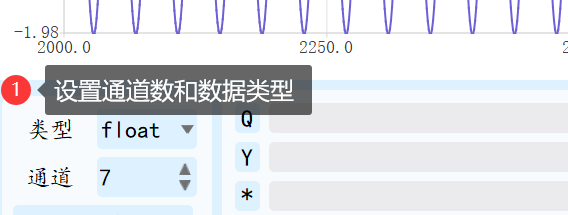
15行定义了发送的数据数组,数组类型需要和上位机中设置的类型一样一致。数组成员数量需要和上位机中设置的通道数量一致。
16~19行对数组赋值。数据是 `getdatas()` 函数生成的三角函数。
20~22行对数组赋值。数据是 `get_cmd()` 函数获取的上位机设置的PID数值。
26~32行使用串口1,通过数据指针将数据发出。`usart_senddatas()` 函数是自己是自己实现的串口多字节发送函数。
2. 波形发送驱动
```C
void usart_senddatas(USART_TypeDef* USARTx,u8* addr,int size)
{
while(size--) //判断数据发送完没有
{
while(USART_GetFlagStatus(USARTx,USART_FLAG_TC) == RESET);//等待上一个byte的数据发送结束。
USART_SendData(USARTx,*addr);//调用STM32标准库函数发送数据
addr++; //地址偏移
}
}
```
## 4.2 接受代码
1. 接收驱动(串口中断函数)
+ 这个函数不需要我们调用它,它会在单片机串口每接收到1Byte数据时自动调用。比如发了发送一个 hello 字符,单片机就会自动调用5次这个函数。
+ 接受到的字符会存在 `usart_readbuff` 数组中,当接收到 `#` 时,会停止将数据保存到数组,并且置位 `usart_readok` ,直到我们处理了这一帧数据。
+ 使用这种方法会让程序有层次性,但是会出现数据阻塞(必须要处理了上一帧数据才会接收下一帧数据)。
```C
char usart_readbuff[30] = {0}; //串口接受缓存数组
u8 usart_readok = 0; //一帧数据处理标志
void USART1_IRQHandler(void) //串口1中断服务程序
{
u8 temp;
static u8 count = 0; // 接收数组控制变量
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //判断是否为接收中断
{
temp = USART_ReceiveData(USART1); //读取接收到的数据,并清除中断标志
if(temp == '#' && usart_readok == 0)
{
usart_readbuff[count] = '#';
usart_readok = 1;
count = 0;
}
else if(usart_readok==0)
{
usart_readbuff[count] = temp; //保存接收到的数据到接收缓存数组
count++; //数组下标切换
if(count >= 30) // 防止数据越界
count = 0;
}
}
}
```
2. 解析函数
+ 关于 `sscanf()和memset()` 函数大家自行了解。
+ 第6行的 `"%3s=%f,%f,%f#"` 字符格式化,和第3.2节的接受函数对应。
```C
u8 usart_get_data(char *cmd,float *d1,float *d2,float *d3)
{
u8 flag = 0;
if(usart_readok == 1)
{
if(sscanf(usart_readbuff,"%3s=%f,%f,%f#",
cmd,d1,d2,d3)==4)
{
flag = 1;
}
//清除接收完成标志
memset(usart_readbuff,0,sizeof(usart_readbuff));
usart_readok = 0;
}
return flag;
}
```
3. 接收的业务代码
```C
void get_cmd(void)
{
char u_buff[10];
float u_d1,u_d2,u_d3;
if(usart_get_data(u_buff,&u_d1,&u_d2,&u_d3))
{
if(strcmp(u_buff,"PID") == 0) //比较命令控制字符是否为PID
{
cmd_P = u_d1;
cmd_I = u_d2;
cmd_D = u_d3;
}
}
memset(u_buff,0,sizeof(u_buff));
}
```
## 4.3 波形生成函数
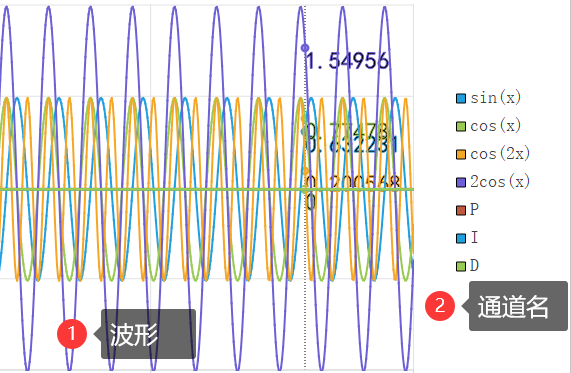
+ 这个函数只是为了在这个示例程序中产生一个波形给大家看。实际使用时用需要观察的数据即可。
```C
void getdatas(void)
{
static float x = 0.00f * PI;
datas[0] = sinf(x);
datas[1] = cosf(x);
datas[2] = cosf(2 * x);
datas[3] = 2 * cosf(x);
x += 0.05f * PI;
}
```
## 4.4 演示效果
+ 第一步设备连接电脑
+ 第二步确定是安装了驱动的
+ 第三步确定STM32示例程序在设备中运行了
然后:
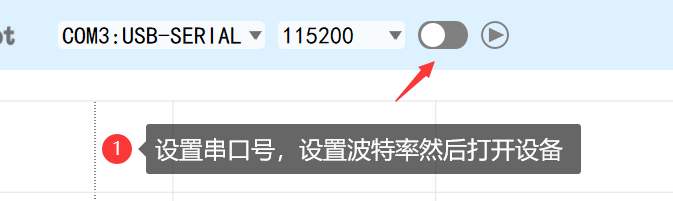
就可以看到:
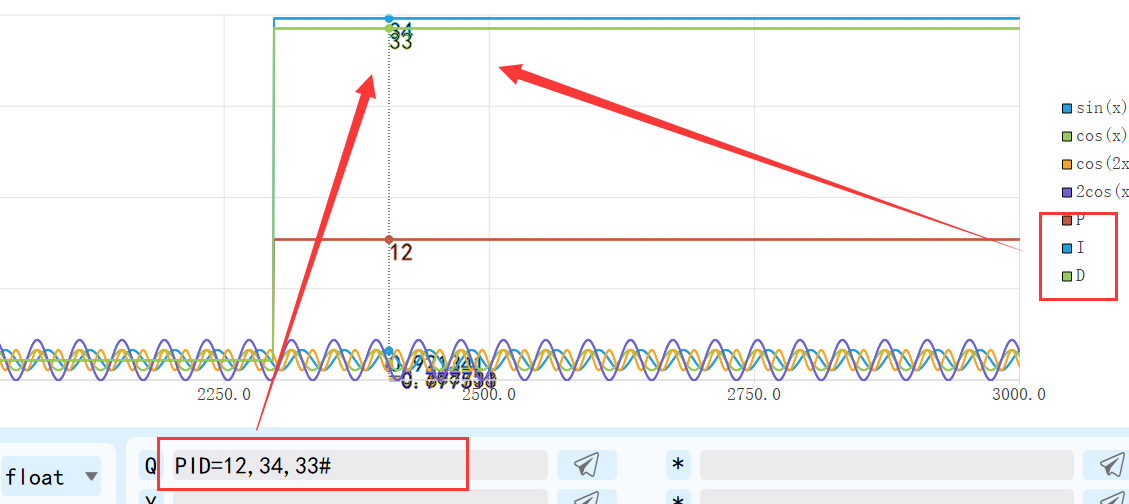
然后在命令窗口输入PID设置命令并发送,就可以看到后三个通道的数据变化了
# 5 如何二次开发
需要二次开发请在文章开头,贴的开源仓库连接中拉取项目。
+ 开发环境为 QT5.9.8 + QT Creator
+ 编译链为 MSVC2017 (因为帮助页面使用了QT的浏览器控件,所以不能用MinGW编译链)
+ 项目是在Windows 10系统中开发的。
拉取项目后在下图框选的文件夹中使用 `QT Creator` 打开.pro文件即可进行二次开发。
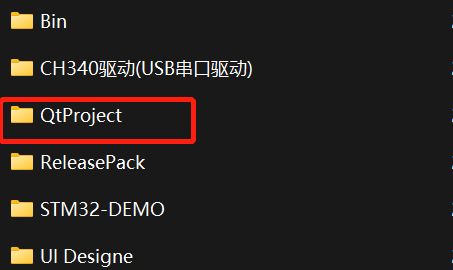
+ `Bin` 目录是用来放可执行文件和依赖库的,相当于发布前的中转站
+ `CH340驱动` 中是ch340芯片的驱动
+ `QtProject` 目录中是Qt的工程,二次开发其实只需要这一个目录即可
+ `ReleasePack` 是放打包好的发布版的目录
+ `STM32-DEMO` 是单片机的示例程序
+ `UI Designe` 是使用 Adobe XD 设计的界面,但是和最后的软件界面还是有一点出入,没有严格按照这个实践。
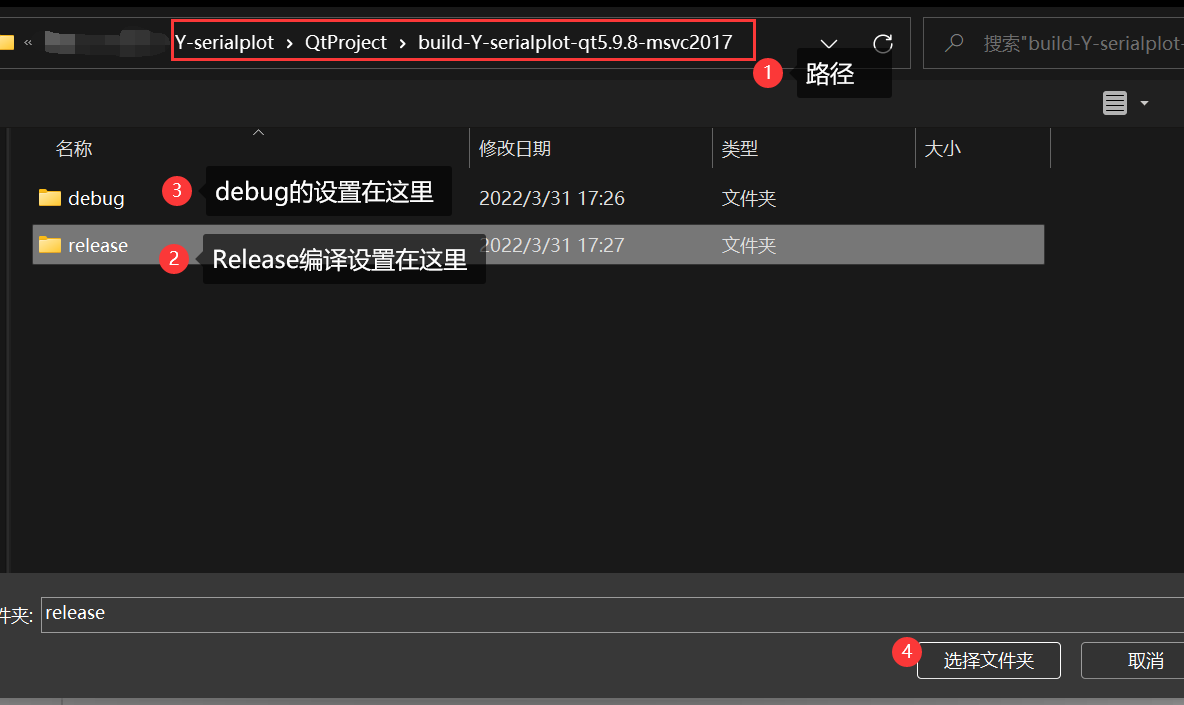
## 建议的编译输出路径
打开项目之后
## 4.1 波形发送
例程中使用的是 STM32 的串口1进行数据收发。
1. 波形发送业务代码
``` C
void send_wave(void)
{
//定义通道名帧头帧尾
u8 frameNameHead[] = "AABBCC";
u8 frameNameEnd[] = "CCBBAA";
//定义数据帧头帧尾
u8 frameDataHead[] = "DDEEFF";
u8 frameDataEnd[] = "FFEEDD";
//定义通道名
u8 name[] = {"sin(x),cos(x),cos(2x),2cos(x),P,I,D"};
//赋值数据
float channels[7];
channels[0] = datas[0];
channels[1] = datas[1];
channels[2] = datas[2];
channels[3] = datas[3];
channels[4] = cmd_P;
channels[5] = cmd_I;
channels[6] = cmd_D;
//通过串口1,向上位机发送数据
usart_senddatas(USART1,frameNameHead,sizeof(frameNameHead)-1);
usart_senddatas(USART1,name,sizeof(name)-1);
usart_senddatas(USART1,frameNameEnd,sizeof(frameNameEnd)-1);
usart_senddatas(USART1,frameDataHead,sizeof(frameDataHead)-1);
usart_senddatas(USART1,(u8*)channels,sizeof(channels));
usart_senddatas(USART1,frameDataEnd,sizeof(frameDataEnd)-1);
}
```
12行的通道名称,是一个字符串,不同通道之间以 `英文逗号,` 间隔,上位机中设置了多少个通道就写多少个名字。
15行定义了发送的数据数组,数组类型需要和上位机中设置的类型一样一致。数组成员数量需要和上位机中设置的通道数量一致。
16~19行对数组赋值。数据是 `getdatas()` 函数生成的三角函数。
20~22行对数组赋值。数据是 `get_cmd()` 函数获取的上位机设置的PID数值。
26~32行使用串口1,通过数据指针将数据发出。`usart_senddatas()` 函数是自己是自己实现的串口多字节发送函数。
2. 波形发送驱动
```C
void usart_senddatas(USART_TypeDef* USARTx,u8* addr,int size)
{
while(size--) //判断数据发送完没有
{
while(USART_GetFlagStatus(USARTx,USART_FLAG_TC) == RESET);//等待上一个byte的数据发送结束。
USART_SendData(USARTx,*addr);//调用STM32标准库函数发送数据
addr++; //地址偏移
}
}
```
## 4.2 接受代码
1. 接收驱动(串口中断函数)
+ 这个函数不需要我们调用它,它会在单片机串口每接收到1Byte数据时自动调用。比如发了发送一个 hello 字符,单片机就会自动调用5次这个函数。
+ 接受到的字符会存在 `usart_readbuff` 数组中,当接收到 `#` 时,会停止将数据保存到数组,并且置位 `usart_readok` ,直到我们处理了这一帧数据。
+ 使用这种方法会让程序有层次性,但是会出现数据阻塞(必须要处理了上一帧数据才会接收下一帧数据)。
```C
char usart_readbuff[30] = {0}; //串口接受缓存数组
u8 usart_readok = 0; //一帧数据处理标志
void USART1_IRQHandler(void) //串口1中断服务程序
{
u8 temp;
static u8 count = 0; // 接收数组控制变量
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //判断是否为接收中断
{
temp = USART_ReceiveData(USART1); //读取接收到的数据,并清除中断标志
if(temp == '#' && usart_readok == 0)
{
usart_readbuff[count] = '#';
usart_readok = 1;
count = 0;
}
else if(usart_readok==0)
{
usart_readbuff[count] = temp; //保存接收到的数据到接收缓存数组
count++; //数组下标切换
if(count >= 30) // 防止数据越界
count = 0;
}
}
}
```
2. 解析函数
+ 关于 `sscanf()和memset()` 函数大家自行了解。
+ 第6行的 `"%3s=%f,%f,%f#"` 字符格式化,和第3.2节的接受函数对应。
```C
u8 usart_get_data(char *cmd,float *d1,float *d2,float *d3)
{
u8 flag = 0;
if(usart_readok == 1)
{
if(sscanf(usart_readbuff,"%3s=%f,%f,%f#",
cmd,d1,d2,d3)==4)
{
flag = 1;
}
//清除接收完成标志
memset(usart_readbuff,0,sizeof(usart_readbuff));
usart_readok = 0;
}
return flag;
}
```
3. 接收的业务代码
```C
void get_cmd(void)
{
char u_buff[10];
float u_d1,u_d2,u_d3;
if(usart_get_data(u_buff,&u_d1,&u_d2,&u_d3))
{
if(strcmp(u_buff,"PID") == 0) //比较命令控制字符是否为PID
{
cmd_P = u_d1;
cmd_I = u_d2;
cmd_D = u_d3;
}
}
memset(u_buff,0,sizeof(u_buff));
}
```
## 4.3 波形生成函数
+ 这个函数只是为了在这个示例程序中产生一个波形给大家看。实际使用时用需要观察的数据即可。
```C
void getdatas(void)
{
static float x = 0.00f * PI;
datas[0] = sinf(x);
datas[1] = cosf(x);
datas[2] = cosf(2 * x);
datas[3] = 2 * cosf(x);
x += 0.05f * PI;
}
```
## 4.4 演示效果
+ 第一步设备连接电脑
+ 第二步确定是安装了驱动的
+ 第三步确定STM32示例程序在设备中运行了
然后:


就可以看到:

然后在命令窗口输入PID设置命令并发送,就可以看到后三个通道的数据变化了

# 5 如何二次开发
需要二次开发请在文章开头,贴的开源仓库连接中拉取项目。
+ 开发环境为 QT5.9.8 + QT Creator
+ 编译链为 MSVC2017 (因为帮助页面使用了QT的浏览器控件,所以不能用MinGW编译链)
+ 项目是在Windows 10系统中开发的。
拉取项目后在下图框选的文件夹中使用 `QT Creator` 打开.pro文件即可进行二次开发。

+ `Bin` 目录是用来放可执行文件和依赖库的,相当于发布前的中转站
+ `CH340驱动` 中是ch340芯片的驱动
+ `QtProject` 目录中是Qt的工程,二次开发其实只需要这一个目录即可
+ `ReleasePack` 是放打包好的发布版的目录
+ `STM32-DEMO` 是单片机的示例程序
+ `UI Designe` 是使用 Adobe XD 设计的界面,但是和最后的软件界面还是有一点出入,没有严格按照这个实践。
## 建议的编译输出路径
打开项目之后
 因为没有删除编译项的配置文件,所以会默认设置成我是用的编译环境,不一定适用于你的电脑,所以下面需要更换一下路径。
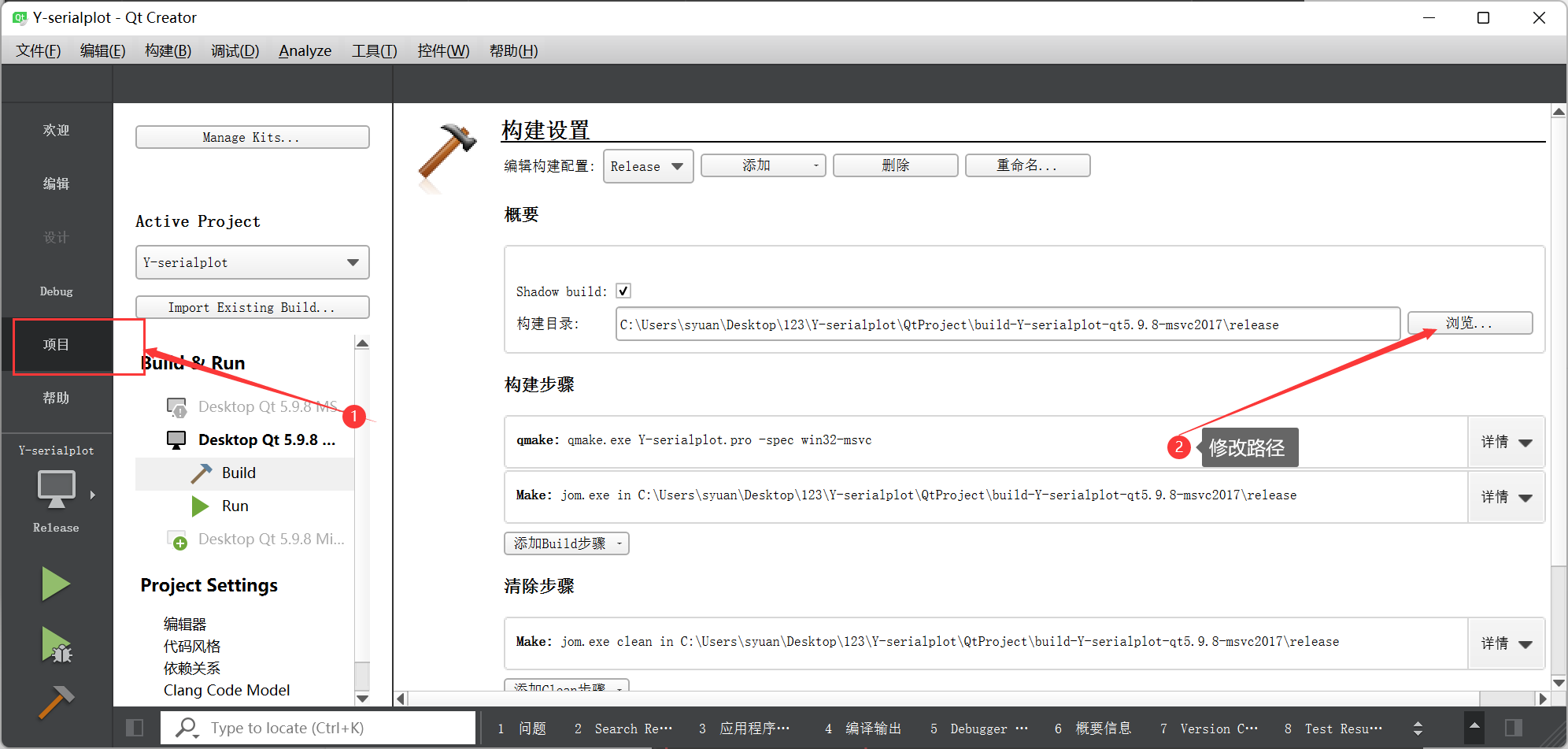
然后编译即可。
在开发环境搭建成功的情况下这是测试直接可以运行成功的。当然编译输出路径也可以根据自己喜好设置。
因为没有删除编译项的配置文件,所以会默认设置成我是用的编译环境,不一定适用于你的电脑,所以下面需要更换一下路径。


然后编译即可。
在开发环境搭建成功的情况下这是测试直接可以运行成功的。当然编译输出路径也可以根据自己喜好设置。